
多种场景地理底图前端打点解决方案总结
案例背景
Web 可视化页面展示应用中,有时需要显示场景的效果图,或是某一行政区划的透视视角图,并在上面添加有交互功能的点位标记,这些点位的位置坐标来源于真实场景的坐标系,这些坐标并不能直接使用在图上,因此需要借助一种映射计算方案,让前端可以直接将地理坐标转化为用于元素打点的绝对定位坐标。
本文通过多次实际项目应用,总结了 **平铺视角底图 **和 透视视角底图上打点的解决方案。
平铺视角-底图映射地理坐标系
在打点底图为平铺视角时,映射坐标相对比较简单。以给淮北市打点位置为例,首先打开附件中的【边界查询&坐标拾取工具】,如下图所示,分别为工具操作和视觉切图。
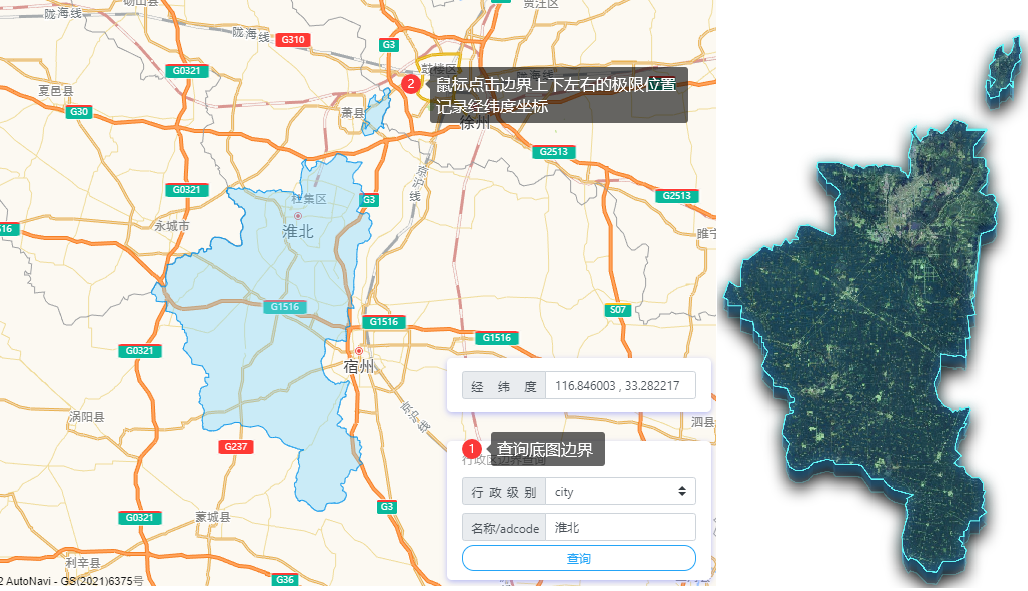
记录边界上下左右(也就是东南西北极点)的坐标,通过线性函数 getBottom 和 getLeft 计算每个点元素的绝对坐标即可。以下为示例:
<div
v-for="(item, i) in data"
:key="`icon${i}`"
:style="{ bottom:getBottom(item), left:getLeft(item) }"
></div>const boxline = [117.060818, 116.382723, 34.25501, 33.251408] // 东,西,北,南
methods: {
getBottom (lonlat) {
const value = (Number(lonlat.lat) - boxline[3]) / (boxline[2] - boxline[3]) * 100
return value + '%'
},
getLeft (lonlat) {
const value = (Number(lonlat.lon) - boxline[1]) / (boxline[0] - boxline[1]) * 100
return value + '%'
},
}透视视角-底图映射地理坐标系
在打点底图为透视视角时,情况就要更复杂一些,因为在屏幕的二维屏幕上,实际地理分布无法进行简单的线性映射了,因此需要一种透视映射算法,完成进一步的映射。下图展示的各种场景都可能会出现透视视角:

本章节将介绍这种情况下的应用实例和原创算法原理。
方案示例
以某科技园区鸟瞰图为例。
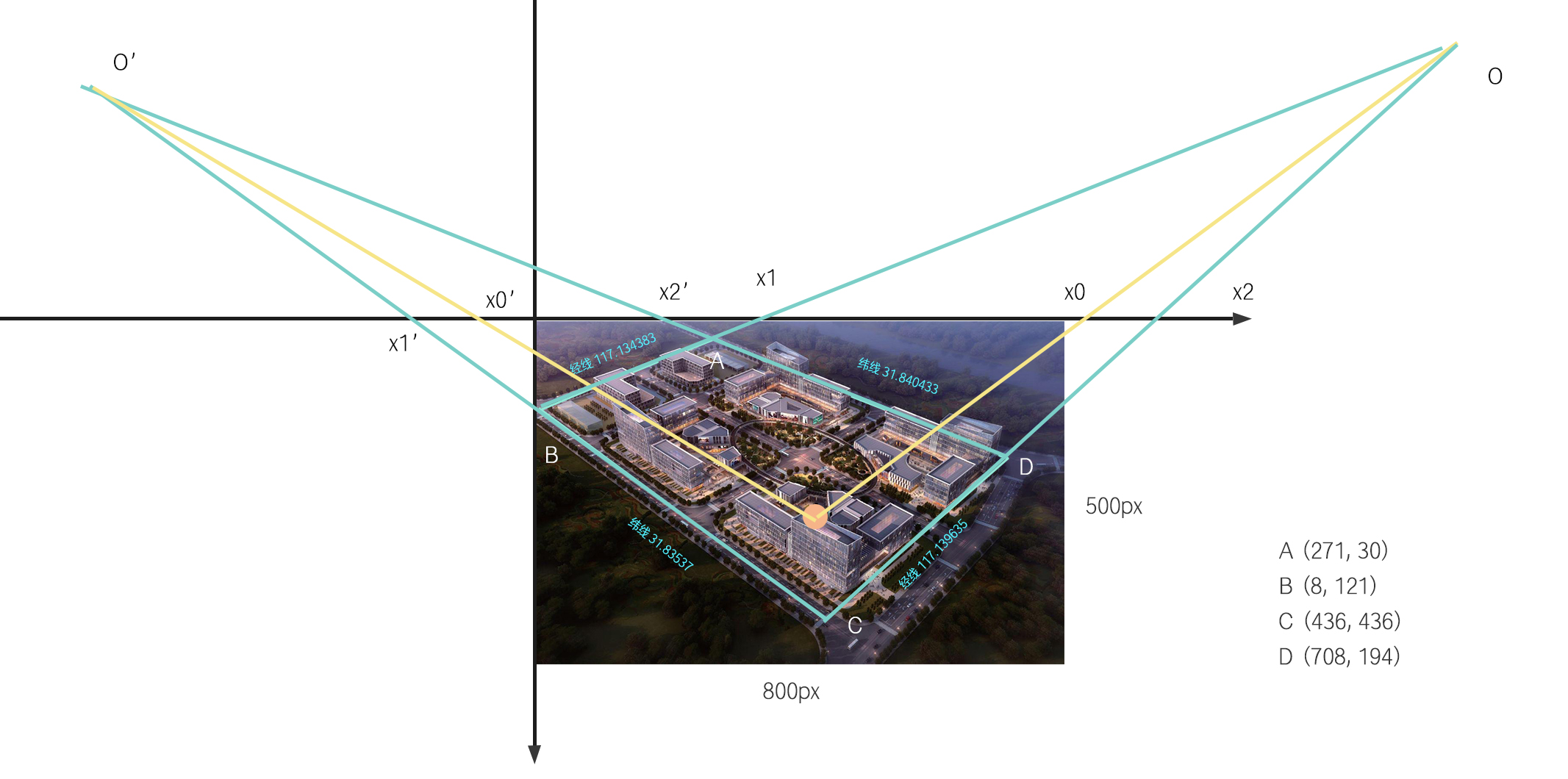
查询该园区的电子地图,依据一些特征点(如路口、建筑物)在图中标记出 两条经线 和 两条纬线,形成一个四边形将园区囊括进去。这四条线在现实中应是两两平行的,但是在图中由于透视,所以并不平行。
经纬度和特征点的确定同样可以使用附件中的【边界查询&坐标拾取工具】。

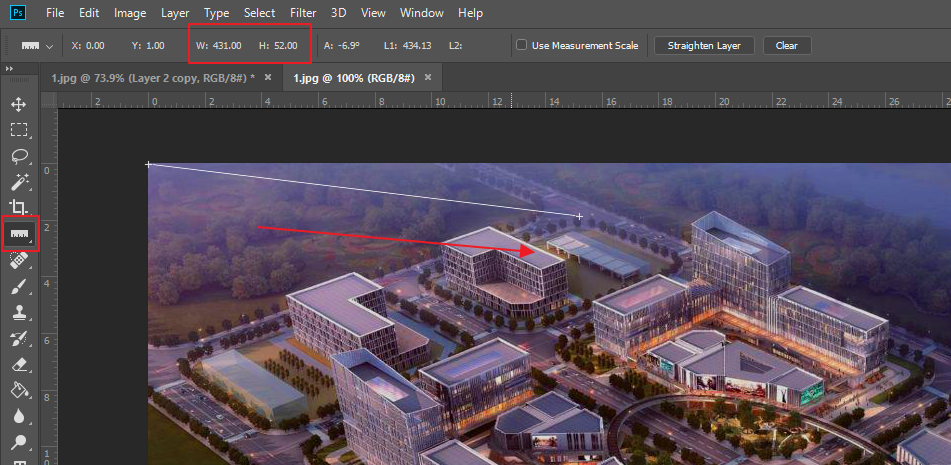
- 测量四边形四个角点在图片上的坐标。以图片左上角为原点,推荐使用Photoshop中的标尺工具,可以看到下图测量得到得角点坐标为(431,52),代表这个点距离顶部52像素看,距离左侧431像素。测量完成4个点坐标后,即完成了映射参数的收集。
在应用代码中,引入附件提供的映射算法文件
perspectiveTrans.js,调用 getPerspectivePoi 函数,入参格式如下:import { getPerspectivePoi } from "./perspectiveTrans.js" const mark1 = [117.13963,31.8404] // 映射源地理坐标 const calibrations = [ [271, 30], // 起始角点 117.134383, // 起始角点一侧的经线度数 [8, 121], // 起始角点一侧的经线的另一侧角点 31.83537, // 上面的点连接的纬线度数,下面依次排列 [436, 436], 117.139635, // 经线度数度数 [708, 194], 31.840433 // 纬线度数 ] const poi = getPerspectivePoi(mark1, calibrations) // 映射后的图像坐标chenC其中参数 calibrations 为一个数组,数组成员依次为刚才在图片上测量到的角点和标线数据,对应案例图中,也就是 点A -> 线AB -> 点B -> 线BC -> 点C -> 线CD -> 点D -> 线DA。
使用计算后的绝对定位坐标将点打在底图上,效果如下所示:

透视映射算法原理
原本在现实中平行的经线和纬线,在有透视的情况下,则会在图中相交于一点,我们称之为“消失点”,如下图所示,点 O 和 O‘ 为消失点。根据测量所得的参数,可以计算:
由 A、B、C、D 四点坐标,求四边形四条边在直角坐标系中的直线方程。
由四条线的直线方程,求四条直线与 x 轴或 y 轴相交点的坐标。算法中会根据线的斜率判断计算x轴还是y轴,以防止线过于平行x轴或y轴,造成误差。图中选取的都是与x轴的交点,为 x1、x2、x1'、x2'。
由四条线的直线方程,求消失点 O 和 O‘ 坐标值。
设映射源标点与消失点的连线为图中黄线,黄线与x轴相交于x0、x0'。映射源坐标为(M, N),标线经度为 m,m',标线纬度为 n,n',则有:
(M - m) / (m' - m) = (x0 - x1) / (x2 - x1),(N - n) / (n' - n) = (x0' - x1') / (x2' - x1')。由此求得 x0 和 x0‘ 坐标值。
由 O 和 O‘ 坐标值,x0 和 x0‘ 坐标值,求得两条黄线的直线方程,两条黄线再求交点即为映射目标的坐标。
在附件 perspectiveTrans.js 中,将这个算法进行实现,代码如下:
/*
* 入参,映射的经纬坐标 mark : [经度, 纬度]
* 入参,图片的透视标定参数 calibrations,详见文档
*/
export const getPerspectivePoi = (mark, calibrations) => {
const lon1 = calcLine(calibrations[0], calibrations[2]) // 经线1方程
const lon2 = calcLine(calibrations[4], calibrations[6]) // 经线2方程
const lat1 = calcLine(calibrations[2], calibrations[4]) // 纬线1方程
const lat2 = calcLine(calibrations[0], calibrations[6]) // 纬线2方程
const lonCrs = calcCross(lon1, lon2) // 经线方向上的消失点
const latCrs = calcCross(lat1, lat2) // 纬线方向上的消失点
if (lon1.k > -1 && lon1.k < 1) {
const lonY = lon1.b + (mark[0] - calibrations[1]) / (calibrations[5] - calibrations[1]) * (lon2.b - lon1.b)
var lonCrsToMark = calcLine(lonCrs, [0, lonY]) // 经线方向上的标点到消失点连线方程
} else {
const lonX = -lon1.b / lon1.k + (mark[0] - calibrations[1]) / (calibrations[5] - calibrations[1]) * (lon1.b / lon1.k - lon2.b / lon2.k)
var lonCrsToMark = calcLine(lonCrs, [lonX, 0]) // 经线方向上的标点到消失点连线方程
}
if (lat1.k > -1 && lat1.k < 1) {
const latY = lat1.b + (mark[1] - calibrations[3]) / (calibrations[7] - calibrations[3]) * (lat2.b - lat1.b)
var latCrsToMark = calcLine(latCrs, [0, latY]) // 纬线方向上的标点到消失点连线方程
} else {
const latX = -lat1.b / lat1.k + (mark[0] - calibrations[3]) / (calibrations[7] - calibrations[3]) * (lat1.b / lat1.k - lat2.b / lat2.k)
var lonCrsToMark = calcLine(lonCrs, [latX, 0]) // 经线方向上的标点到消失点连线方程
}
return calcCross(lonCrsToMark, latCrsToMark)
}
function calcLine(poi1, poi2) { // 求直线方程斜率和截距
const x1 = poi1[0]
const y1 = poi1[1]
const x2 = poi2[0]
const y2 = poi2[1]
const k = (y2 - y1) / (x2 - x1) // 斜率
const b = y1 - x1 * (y2 - y1) / (x2 - x1) // 截距
return {k, b}
}
function calcCross(line1, line2) { // 求两直线交点
const x = (line2.b - line1.b) / (line1.k - line2.k)
const y = line1.k * x + line1.b
return [x, y]
}